 Reference frame
Reference frame
Learning objectives
- Define a reference frame;
- Define a galilean (inertial) reference frame.
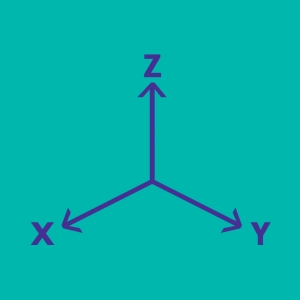
The most common representation of a reference frame is the Cartesian (rectangular) reference frame (Oxyz). This is a system of three orthogonal axes (X, Y and Z) defined at an arbitrarily chosen point O.
It can be used to locate any point or object in space, based on its coordinates (x, y, z).
Among the infinite number of existing reference frames, the most widely used are :
- the local reference frame (or laboratory reference frame) ;
- the geocentric reference frame ;
- the heliocentric reference frame;
A distinction is made between galilean (or inertial) and non-galilean (or non-inertial) reference frames.
In a Galilean frame, the law of inertia applies: a body that is not subjected to any force remains at rest or in uniform motion. In other words, the frame is not itself accelerated (it does not accelerate, brake, rotate, etc.).
For the local study of a body's motion and over a period of a few seconds, the local reference frame could be considered inertial. In many cases, however, the geocentric or heliocentric frame will be preferred.
Discover EduMedia for free
The interactive encyclopedia that brings science and math to life in the classroom.
O v e r 1 , 0 0 0 r e s o u r c e s